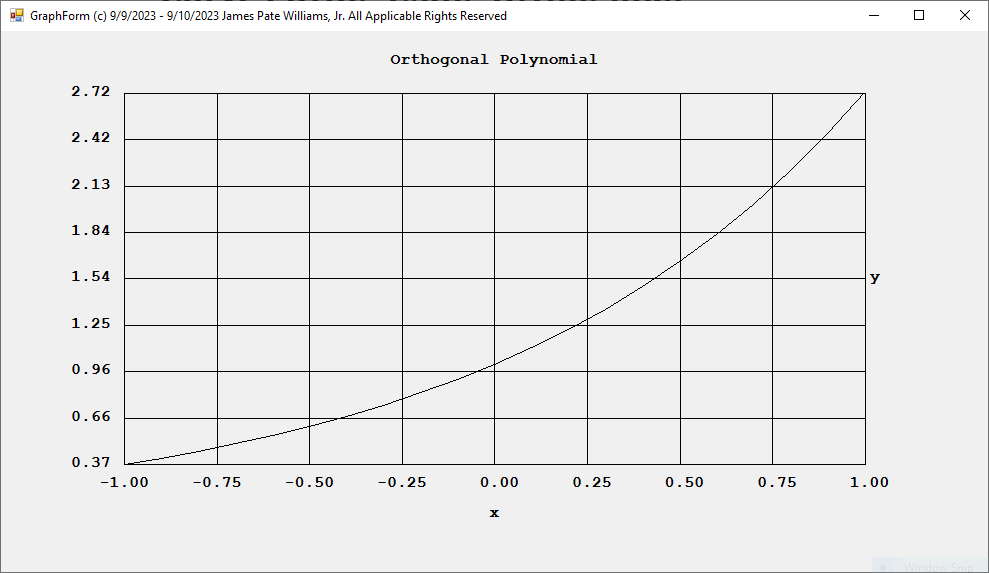
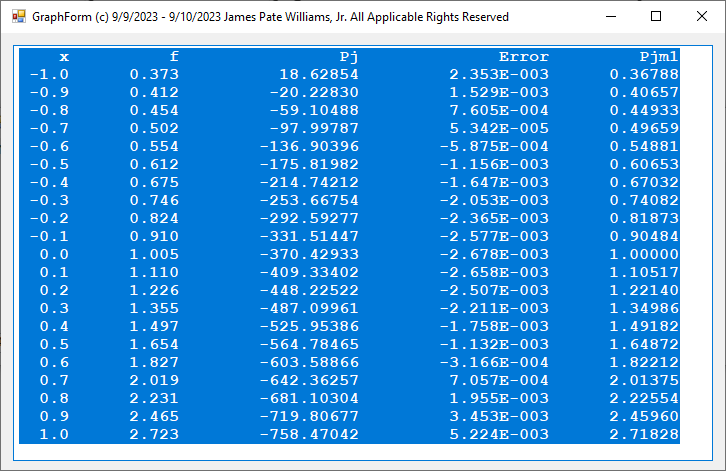
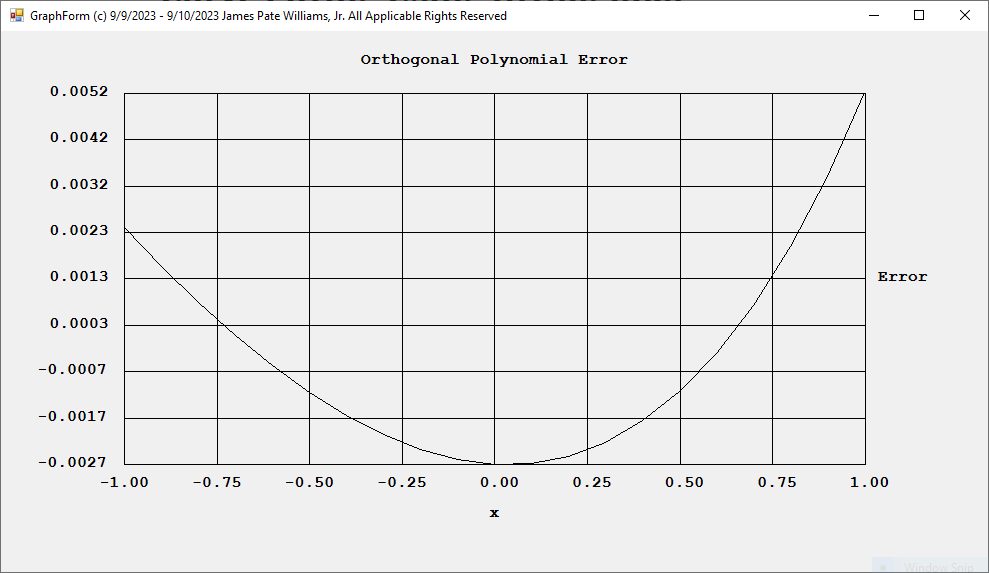
The curve in this best fit example is the function y(x) = exp(x).

The curve in this best fit example is the function y(x) = exp(x).
I added the Runge-Kutta 4 algorithm found in Numerical Analysis: An Algorithmic Approach Third Edition by S. D. Conte and Carl de Boor. I also added a multistep method, the Adams-Bashforth Method.




“Babe Ruth is generally considered the owner of the record for the longest home run in MLB history with a 575-foot bomb launched at Navin Field in Detroit in 1921.” – https://www.msn.com/en-us/sports/mlb/what-is-the-longest-home-run-in-mlb-history/ar-AA1dGwlZ
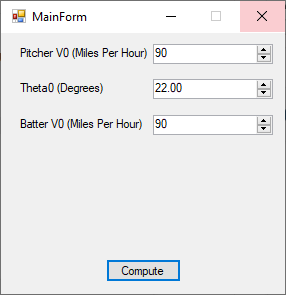
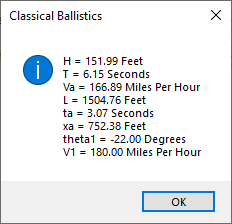
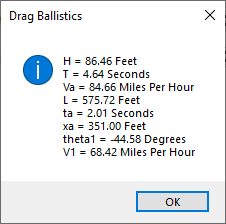
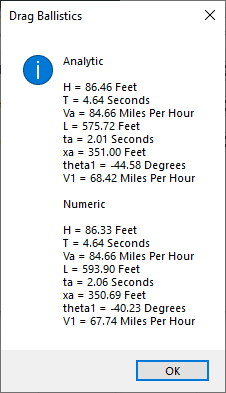
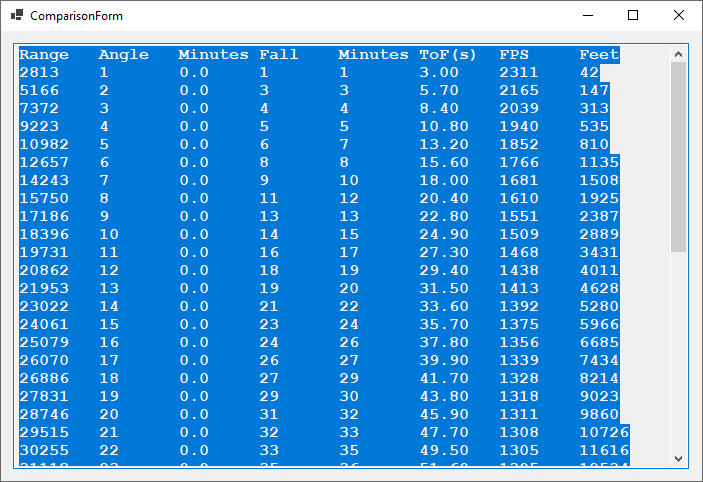
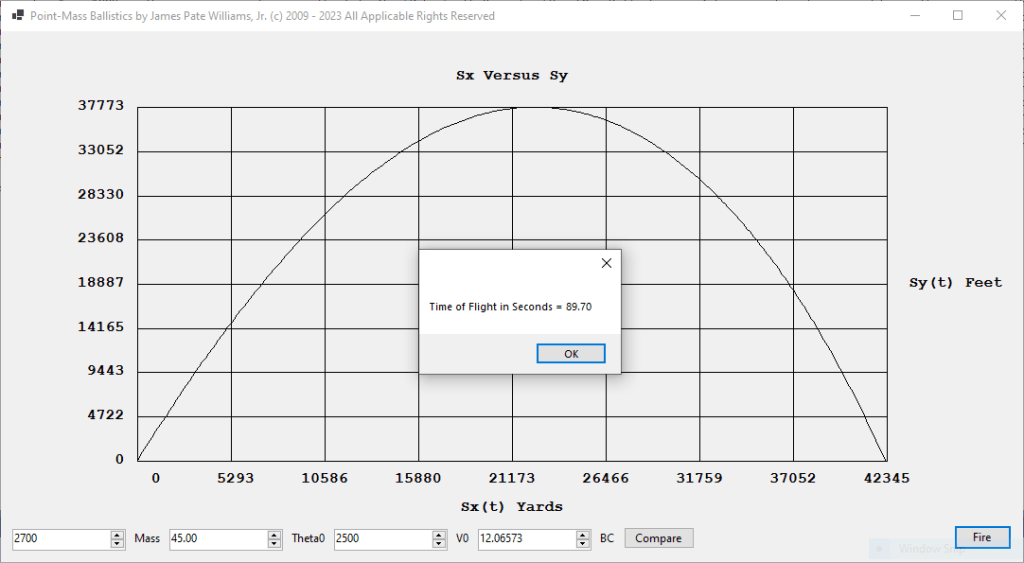
As you can see, I estimated the pitch velocity at 90 miles per hour and Babe Ruth’s (Sultan of Swing) at 90 miles per hour also. My analytic calculations yield a range of the baseball’s trajectory as about 576 feet.
// "Numerical Computation 2: Methods, Software,
// and Analysis" by Christoph W. Ueberhuber
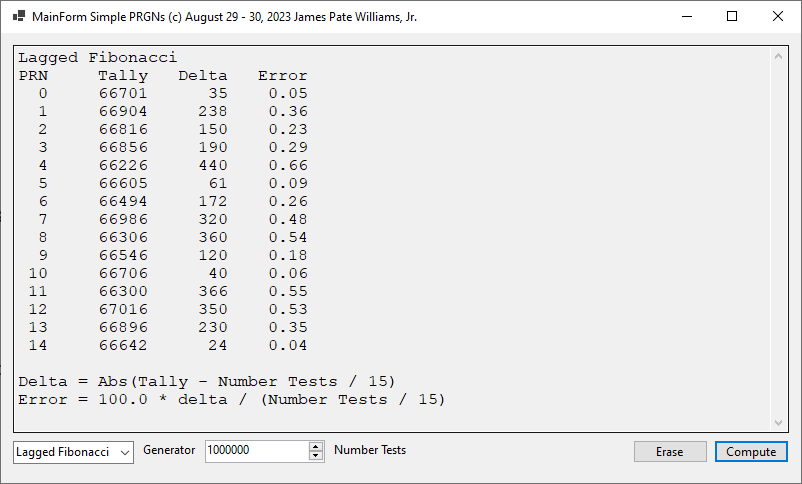
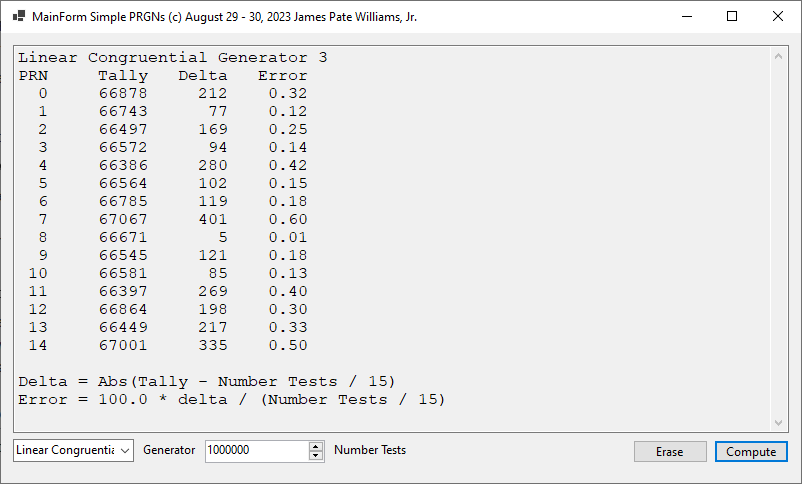
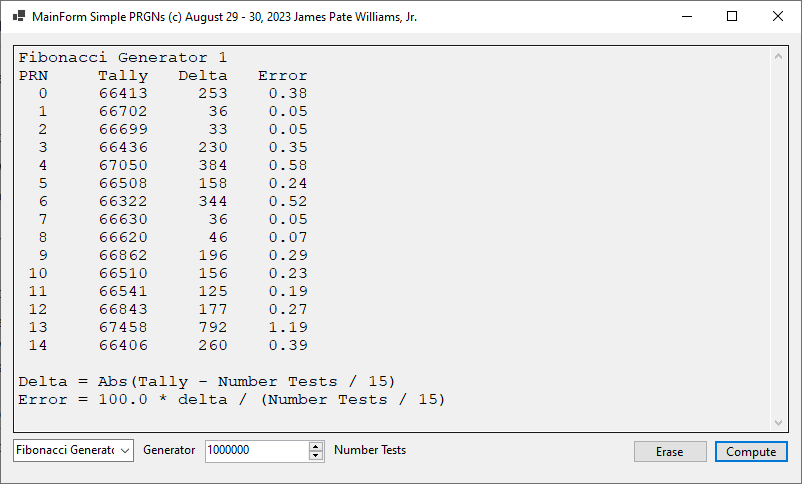
// Chapter 17 Random Numbers
// "The Art of Computer Programming Volume 2"
// "Seminumerical Algorithms Second Edition"
// "Chapter 3 RANDOM NUMBERS" by Donald E. Knuth
// https://en.wikipedia.org/wiki/Mersenne_Twister
using System.Collections.Generic;
namespace SimplePRNGs
{
class PRNGs
{
private long AMxn1, AMxn;
private long AMyn1, AMyn;
private long AMk;
private long AMm = 34359738368;
private long LCG0z0, LCG0z1;
private long LCG1z0, LCG1z1;
private long LCG2z0, LCG2z1, LCG2z2;
private long MFG0z0, MFG0z1;
private readonly long LCG0m = 4294967296;
private readonly long LCG2m = 2147483647;
private readonly List<long> AMV = new();
private long MTindex;
private long[] MT;
private LaggedFibRng fibRng;
public void SetSeedLCG0(long z0)
{
LCG0z0 = z0;
}
public void SetSeedLCG1(long z0)
{
LCG1z0 = z0;
}
public void SetSeedLCG2(long z0, long z1)
{
LCG2z0 = z0;
LCG2z1 = z1;
}
public long LCG0()
{
LCG0z1 = (69069 * LCG0z0) % LCG0m;
LCG0z0 = LCG0z1;
return LCG0z1;
}
public long LCG1()
{
LCG1z1 = (69069 * LCG1z0 + 1) % LCG0m;
LCG1z0 = LCG1z1;
return LCG1z1;
}
public long LCG2()
{
LCG2z2 = (1999 * LCG2z1 + 4444 * LCG2z0) % LCG2m;
LCG2z0 = LCG2z1;
LCG2z1 = LCG2z2;
return LCG2z2;
}
public void SetSeedMFG0(long z0, long z1)
{
MFG0z0 = z0;
MFG0z1 = z1;
}
public long MFG0()
{
long MFG0z2 = (MFG0z1 + MFG0z0) % LCG0m;
MFG0z0 = MFG0z1;
MFG0z1 = MFG0z2;
return MFG0z2;
}
public void ComputeNextXY()
{
AMxn1 = (3141592653 * AMxn + 2718281829) % AMm;
if (AMxn1 < 0)
AMxn1 += AMm;
AMyn1 = (2718281829 * AMyn + 3141592653) % AMm;
if (AMyn1 < 0)
AMyn1 += AMm;
}
public void AMSeed(long k, long x0, long y0)
{
long AMTxn1, AMTxn = x0;
AMxn = x0;
AMyn = y0;
AMk = k;
for (int i = 0; i < k; i++)
{
AMTxn1 = (3141592653 * AMTxn + 2718281829) % AMm;
if (AMTxn1 < 0)
AMTxn1 += AMm;
AMTxn = AMTxn1;
AMV.Add(AMTxn1);
}
}
public long AlgorithmM()
{
ComputeNextXY();
AMxn = AMxn1;
AMyn = AMyn1;
long j = (AMk * AMyn1) / AMm;
long r = AMV[(int)j];
AMV[(int)j] = AMxn1;
if (r < 0)
r += AMm;
return r;
}
public void MTInitialization(long seed)
{
long f = 6364136223846793005;
long n = 312, w = 64;
MTindex = n;
MT = new long[n];
MT[0] = seed;
for (int i = 1; i < n; i++)
MT[i] = f * (MT[i - 1] ^ (MT[i - 1] >> (int)(w - 2))) + i;
}
public long MTExtractNumber()
{
unchecked
{
long n = 312;
long c = (long)0xFFF7EEE000000000;
long b = 0x71D67FFFEDA60000;
long d = 0x5555555555555555;
long u = 29, s = 17, t = 27, l = 43;
if (MTindex == n)
MTTwist();
long y = MT[MTindex];
y ^= ((y >> (int)u) & d);
y ^= ((y << (int)s) & b);
y ^= ((y << (int)t) & c);
y ^= (y >> (int)l);
MTindex++;
return y;
}
}
public void MTTwist()
{
unchecked
{
long n = 312, m = 156, r = 31;
long a = (long)0xB5026F5AA96619E9;
MTindex = n + 1;
long lower_mask = (1 << (int)r) - 1;
long upper_mask = ~lower_mask;
for (int i = 0; i < n; i++)
{
long x = (MT[i] & upper_mask) |
(MT[(i + 1) % n] & lower_mask);
long xA = x >> 1;
if (x % 2 != 0)
xA ^= a;
MT[i] = MT[(i + m) % n] ^ xA;
}
}
MTindex = 0;
}
public void LaggedFibRngSeed(int seed)
{
fibRng = new LaggedFibRng(seed);
}
public long LaggedFibonacci(long modulus)
{
long lo = fibRng.Next();
long hi = fibRng.Next();
long rs = ((hi << 31) | lo) % modulus;
return rs;
}
}
}
//https://learn.microsoft.com/en-us/archive/msdn-magazine/2016/august/test-run-lightweight-random-number-generation
// modified by current author James Pate Williams, Jr. on August 30, 2023
using System.Collections.Generic;
namespace SimplePRNGs
{
public class LaggedFibRng
{
private const int k = 606; // Largest magnitude"-index"
private const int j = 273; // Other "-index"
private const long m = 4294967296; // 2^32
private readonly List<long> vals = null;
private long seed;
public LaggedFibRng(int seed)
{
vals = new List<long>();
for (int i = 0; i < k + 1; ++i)
vals.Add(i);
if (seed % 2 == 0) vals[0] = 11;
// Burn some values away
for (int ct = 0; ct < 1000; ++ct)
{
long dummy = Next();
}
} // ctor
public long Next()
{
// (a + b) mod n = [(a mod n) + (b mod n)] mod n
long left = vals[0] % m; // [x-big]
long right = vals[k - j] % m; // [x-other]
long sum = (left + right) % m; // prevent overflow
if (sum < 0)
seed = sum + m;
else
seed = sum;
vals.Insert(k + 1, seed); // Add new val at end
vals.RemoveAt(0); // Delete now irrelevant [0] val
return seed;
}
}
}



// "Numerical Computation 2: Methods, Software,
// and Analysis" by Christoph W. Ueberhuber
// Chapter 17 Random Numbers
// "The Art of Computer Programming Volume 2"
// "Seminumerical Algorithms Second Edition"
// "Chapter 3 RANDOM NUMBERS" by Donald E. Knuth
using System.Collections.Generic;
namespace SimplePRNGs
{
class PRNGs
{
private long AMxn1, AMxn;
private long AMyn1, AMyn;
private long AMk;
private long AMm = 34359738368;
private long LCG0z0, LCG0z1;
private long LCG1z0, LCG1z1;
private long LCG2z0, LCG2z1, LCG2z2;
private long MFG0z0, MFG0z1;
private readonly long LCG0m = 4294967296;
private readonly long LCG2m = 2147483647;
private readonly List<long> AMV = new();
public void SetSeedLCG0(long z0)
{
LCG0z0 = z0;
}
public void SetSeedLCG1(long z0)
{
LCG1z0 = z0;
}
public void SetSeedLCG2(long z0, long z1)
{
LCG2z0 = z0;
LCG2z1 = z1;
}
public long LCG0()
{
LCG0z1 = (69069 * LCG0z0) % LCG0m;
LCG0z0 = LCG0z1;
return LCG0z1;
}
public long LCG1()
{
LCG1z1 = (69069 * LCG1z0 + 1) % LCG0m;
LCG1z0 = LCG1z1;
return LCG1z1;
}
public long LCG2()
{
LCG2z2 = (1999 * LCG2z1 + 4444 * LCG2z0) % LCG2m;
LCG2z0 = LCG2z1;
LCG2z1 = LCG2z2;
return LCG2z2;
}
public void SetSeedMFG0(long z0, long z1)
{
MFG0z0 = z0;
MFG0z1 = z1;
}
public long MFG0()
{
long MFG0z2 = (MFG0z1 + MFG0z0) % LCG0m;
MFG0z0 = MFG0z1;
MFG0z1 = MFG0z2;
return MFG0z2;
}
public void ComputeNextXY()
{
AMxn1 = (3141592653 * AMxn + 2718281829) % AMm;
if (AMxn1 < 0)
AMxn1 += AMm;
AMyn1 = (2718281829 * AMyn + 3141592653) % AMm;
if (AMyn1 < 0)
AMyn1 += AMm;
}
public void AMSeed(long k, long x0, long y0)
{
long AMTxn1, AMTxn = x0;
AMxn = x0;
AMyn = y0;
AMk = k;
for (int i = 0; i < k; i++)
{
AMTxn1 = (3141592653 * AMTxn + 2718281829) % AMm;
if (AMTxn1 < 0)
AMTxn1 += AMm;
AMTxn = AMTxn1;
AMV.Add(AMTxn1);
}
}
public long AlgorithmM()
{
ComputeNextXY();
AMxn = AMxn1;
AMyn = AMyn1;
long j = (AMk * AMyn1) / AMm;
long r = AMV[(int)j];
AMV[(int)j] = AMxn1;
if (r < 0)
r += AMm;
return r;
}
}
}
namespace PointMassBallistics
{
public class TableEntry : IComparable<TableEntry>
{
public double range, elevationDegrees, elevationMinutes,
angleFallDegrees, angleFallMinutes, timeOfFlight,
strikingVelocity, maximumOrdinate;
public int CompareTo(TableEntry other)
{
if (elevationDegrees < other.elevationDegrees &&
elevationMinutes < other.elevationMinutes)
return -1;
if (elevationDegrees > other.elevationDegrees &&
elevationMinutes > other.elevationMinutes)
return +1;
return 0;
}
}
}
// Solves the following system of first order
// ordinary differential equations. Formulas
// are from "Elementary Numerical Analysis:
// An Algorithmic Approach 3rd Edition" by S.
// D. Conte & Carl de Boor (c) 1980 8.12 page 398.
// Extended from two to four equations.
// See https://apps.dtic.mil/dtic/tr/fulltext/u2/a439796.pdf
// Also view https://eugeneleeslover.com/USN-GUNS-AND-RANGE-TABLES/OP-770-1.html
using System;
using System.Collections.Generic;
namespace PointMassBallistics
{
class RungeKutta4
{
private double BC;
private readonly double g = 32.17405;
private readonly double[] GarveN = {
2, 3, 5, 3, 2, 1.7, 1.55 };
private readonly double[] log10K = {
5.66989 - 10, 2.77344 - 10, 6.80187 - 20,
2.98090 - 10, 6.11926 - 10, 7.09620 - 10, 7.60905 - 10 };
private readonly double[] K = new double[7];
private int zone;
static private double Density(double y)
{
return Math.Pow(10, -0.00001372 * y);
}
static private int ComputeIndex(double v)
{
int index;
if (v > 3600)
index = 6;
else if (v > 2600 && v <= 3600)
index = 5;
else if (v > 1800 && v <= 2600)
index = 4;
else if (v > 1370 && v <= 1800)
index = 3;
else if (v > 1230 && v <= 1370)
index = 2;
else if (v > 790 && v <= 1230)
index = 1;
else
index = 0;
return index;
}
public double MayevskiRetardation(double v, int zone)
{
// See Exterior Ballistics 1935 by Ernest Edward Herrmann
// Garve function
return K[zone] * Math.Pow(v, GarveN[zone]);
}
private double Vx(double syn, double vxn, double vyn)
{
double v = Math.Sqrt(vxn * vxn + vyn * vyn);
zone = ComputeIndex(v);
double E = Density(syn) * MayevskiRetardation(v, zone) / BC;
return -E * vxn / v;
}
private double Vy(double syn, double vxn, double vyn)
{
double v = Math.Sqrt(vxn * vxn + vyn * vyn);
zone = ComputeIndex(v);
double E = Density(syn) * MayevskiRetardation(v, zone) / BC;
return -E * vyn / v - g;
}
static private double Sx(double vxn)
{
return vxn;
}
static private double Sy(double vyn)
{
return vyn;
}
public void Solve(
double t0, double t1,
double vx0, double vy0,
double sx0, double sy0,
double BC, int nSteps, ref List<double> lt,
ref List<double> lvx, ref List<double> lvy,
ref List<double> lsx, ref List<double> lsy)
{
double k1, k2, k3, k4;
double l1, l2, l3, l4;
double m1, m2, m3, m4;
double n1, n2, n3, n4;
double h = (t1 - t0) / nSteps, tn = t0;
double vxn = vx0, vyn = vy0, sxn = sx0, syn = sy0;
int n = 1;
for (int i = 0; i < log10K.Length; i++)
K[i] = Math.Pow(10, log10K[i]);
this.BC = BC;
lt.Add(tn);
lvx.Add(vxn);
lvy.Add(vyn);
lsx.Add(sxn / 3);
lsy.Add(syn);
while (true)
{
tn = t0 + n * h;
k1 = h * Vx(syn, vxn, vyn);
l1 = h * Vy(syn, vxn, vyn);
m1 = h * Sx(vxn);
n1 = h * Sy(vyn);
k2 = h * Vx(syn + 0.5 * n1, vxn + 0.5 * k1, vyn + 0.5 * l1);
l2 = h * Vy(syn + 0.5 * n1, vxn + 0.5 * k1, vyn + 0.5 * l1);
m2 = h * Sx(vxn + 0.5 * m1);
n2 = h * Sy(vyn + 0.5 * n1);
k3 = h * Vx(syn + 0.5 * n2, vxn + 0.5 * k2, vyn + 0.5 * l2);
l3 = h * Vy(syn + 0.5 * n2, vxn + 0.5 * k2, vyn + 0.5 * l2);
m3 = h * Sx(vxn + 0.5 * m2);
n3 = h * Sy(vyn + 0.5 * n2);
k4 = h * Vx(syn + n3, vxn + k3, vyn + l3);
l4 = h * Vy(syn + n3, vxn + k3, vyn + l3);
m4 = h * Sx(vxn + m3);
n4 = h * Sy(vyn + n3);
vxn = vx0 + (k1 + 2 * k2 + 2 * k3 + k4) / 6.0;
vyn = vy0 + (l1 + 2 * l2 + 2 * l3 + l4) / 6.0;
sxn = sx0 + (m1 + 2 * m2 + 2 * m3 + m4) / 6.0;
syn = sy0 + (n1 + 2 * n2 + 2 * n3 + n4) / 6.0;
vx0 = vxn;
vy0 = vyn;
sx0 = sxn;
sy0 = syn;
n++;
lt.Add(tn);
lvx.Add(vxn);
lvy.Add(vyn);
lsx.Add(sxn / 3);
lsy.Add(syn);
if (syn <= 1.0e-2)
break;
}
}
}
}
// Solves the following system of first order
// ordinary differential equations. Formulas
// are from "Elementary Numerical Analysis:
// An Algorithmic Approach 3rd Edition" by S.
// D. Conte & Carl de Boor (c) 1980 8.12 page 398.
// Extended from two to four equations.
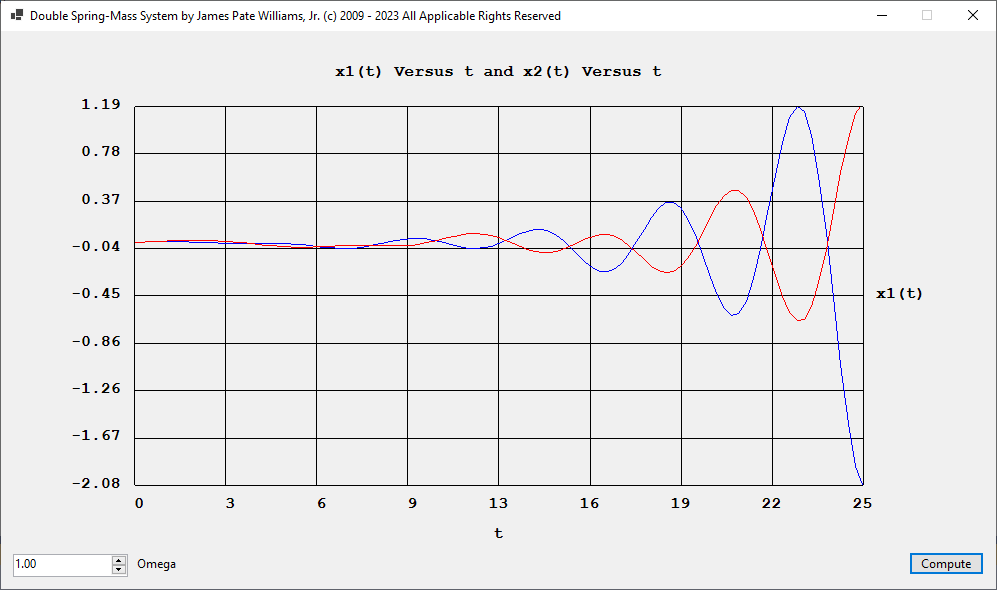
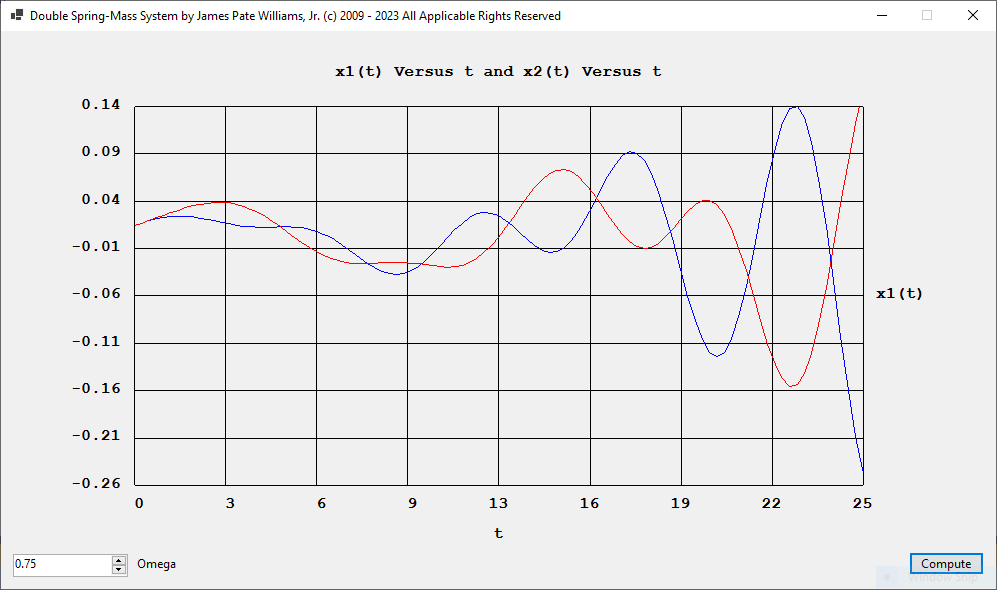
// See "Ordinary Differential Equations
// from Calculus to Dynamical Systems"
// by Virginia W. Noonburg for the exact
// solution, view pages 167 - 170.
using System.Collections.Generic;
namespace DoubleSpring
{
class RungeKutta4
{
private double omega2;
static private double Dx1(double x3)
{
return x3;
}
static private double Dx2(double x4)
{
return x4;
}
private double Dx3(double x1, double x2)
{
return -2 * omega2 * x1 + omega2 * x2;
}
private double Dx4(double x1, double x2)
{
return omega2 * x1 - omega2 * x2;
}
public void Solve(
double t0, double t1,
double x10, double x20,
double x30, double x40,
double omega, int nSteps, ref List<double> lt,
ref List<double> lx1, ref List<double> lx2,
ref List<double> lx3, ref List<double> lx4)
{
double k1, k2, k3, k4;
double l1, l2, l3, l4;
double m1, m2, m3, m4;
double n1, n2, n3, n4;
double h = (t1 - t0) / nSteps, tn = t0;
double x1n = x10, x2n = x20, x3n = x30, x4n = x40;
int n = 1;
omega2 = omega * omega;
lt.Add(tn);
lx1.Add(x1n);
lx2.Add(x2n);
lx3.Add(x3n);
lx4.Add(x4n);
while (tn <= t1)
{
tn = t0 + n * h;
k1 = h * Dx1(x3n);
l1 = h * Dx2(x4n);
m1 = h * Dx3(x1n, x2n);
n1 = h * Dx4(x1n, x2n);
k2 = h * Dx1(x3n + 0.5 * k1);
l2 = h * Dx2(x4n + 0.5 * l1);
m2 = h * Dx3(x1n + 0.5 * m1, x2n + 0.5 * n1);
n2 = h * Dx4(x1n + 0.5 * m1, x2n + 0.5 * n1);
k3 = h * Dx1(x3n + 0.5 * k2);
l3 = h * Dx2(x4n + 0.5 * l2);
m3 = h * Dx3(x1n + 0.5 * m2, x2n + 0.5 * n2);
n3 = h * Dx4(x1n + 0.5 * m2, x2n + 0.5 * n2);
k4 = h * Dx1(x3n + k3);
l4 = h * Dx2(x4n + l3);
m4 = h * Dx3(x1n + m3, x2n + n3);
n4 = h * Dx4(x1n + m3, x2n + n3);
x1n = x10 + (k1 + 2 * k2 + 2 * k3 + k4) / 6.0;
x2n = x20 + (l1 + 2 * l2 + 2 * l3 + l4) / 6.0;
x3n = x30 + (m1 + 2 * m2 + 2 * m3 + m4) / 6.0;
x4n = x40 + (n1 + 2 * n2 + 2 * n3 + n4) / 6.0;
x10 = x1n;
x20 = x2n;
x30 = x3n;
x40 = x4n;
n++;
lt.Add(tn);
lx1.Add(x1n);
lx2.Add(x2n);
lx3.Add(x3n);
lx4.Add(x4n);
}
}
}
}
// Two-tank Mixing Problem
// x'(t) = f(t, x, y)
// y'(t) = g(t, x, y)
// x(0) = 5, y(0) = 1
// See “Ordinary Differential Equations
// from Calculus to Dynamical Systems”
// by Virginia W. Noonburg for the exact
// solution, view pages 165 – 167. Also
// see “Elementary Numerical Analysis:
// An Algorithmic Approach Third
// Edition” by S. D. Conte and Carl de
// Boor pages 398 – 491 for the Runge-
// Kutta-4 equations.

#include "RK4System.h"
void RK4System::Solve(
real t0, real t1,
real x0, real z0,
real(*f)(real, real, real),
real(*g)(real, real, real),
int nSteps, vector<real>& tv,
vector<real>& xv, vector<real>& yv)
{
real k1, k2, k3, k4, l1, l2, l3, l4;
real h, tn, xn, yn, xn1, yn1;
h = (t1 - t0) / nSteps;
tn = t0;
xn = x0;
yn = z0;
tv.push_back(tn);
xv.push_back(xn);
yv.push_back(yn);
for (unsigned int n = 1; n <= nSteps; n++)
{
tn = t0 + n * h;
k1 = h * f(tn, xn, yn);
l1 = h * g(tn, xn, yn);
k2 = h * f(tn + 0.5 * h, xn + 0.5 * k1, yn + 0.5 * l1);
l2 = h * g(tn + 0.5 * h, xn + 0.5 * k1, yn + 0.5 * l1);
k3 = h * f(tn + 0.5 * h, xn + 0.5 * k2, yn + 0.5 * l2);
l3 = h * g(tn + 0.5 * h, xn + 0.5 * k2, yn + 0.5 * l2);
k4 = h * f(tn + h, xn + k3, yn + l3);
l4 = h * g(tn + h, xn + k3, yn + l3);
xn1 = xn + (k1 + 2 * k2 + 2 * k3 + k4) / 6.0;
yn1 = yn + (l1 + 2 * l2 + 2 * l3 + l4) / 6.0;
xn = xn1;
yn = yn1;
tv.push_back(tn);
xv.push_back(xn);
yv.push_back(yn);
}
}
#pragma once
// Solves the following system of first order
// ordinary differential equations. Formulas
// are from "Elementary Numerical Analysis:
// An Algorithmic Approach" by S. D. Conte &
// Carl de Boor (c) 1980 8.12 page 398.
// x' = f(t, x, y)
// y' = g(t, x, y)
#include <vector>
using namespace std;
typedef long double real;
class RK4System
{
public:
static void Solve(
real t0, real t1,
real x0, real y0,
real(*f)(real, real, real),
real(*g)(real, real, real),
int nSteps, vector<real>& tv,
vector<real>& xv, vector<real>& yv);
};




#include <algorithm>
#include <iomanip>
#include <iostream>
#include <chrono>
#include <vector>
using namespace std;
typedef long long ll;
typedef struct ecPoint
{
ll x, y;
} ECPOINT, *PECPOINT;
typedef struct ecPointOrder
{
ll order;
ECPOINT pt;
} ECPOINTORDER, * PECPOINTORDER;
int JACOBI(ll a, ll n)
{
int e = 0, s;
ll a1, b = a, m, n1;
if (a == 0) return 0;
if (a == 1) return 1;
while ((b & 1) == 0)
{
b >>= 1;
e++;
}
a1 = b;
m = n % 8;
if (!(e & 1)) s = 1;
else if (m == 1 || m == 7) s = +1;
else if (m == 3 || m == 5) s = -1;
if (n % 4 == 3 && a1 % 4 == 3) s = -s;
if (a1 != 1) n1 = n % a1; else n1 = 1;
return s * JACOBI(n1, a1);
}
ll ExpMod(ll x, ll b, ll n)
/* returns x ^ b mod n */
{
ll a = 1LL, s = x;
if (b == 0)
return 1LL;
while (b != 0) {
if (b & 1l) a = (a * s) % n;
b >>= 1;
if (b != 0) s = (s * s) % n;
}
if (a < 0)
a += n;
return a;
}
ll ExtendedEuclidean(ll b, ll n)
{
ll b0 = b, n0 = n, t = 1, t0 = 0, temp, q, r;
q = n0 / b0;
r = n0 - q * b0;
while (r > 0) {
temp = t0 - q * t;
if (temp >= 0) temp = temp % n;
else temp = n - (-temp % n);
t0 = t;
t = temp;
n0 = b0;
b0 = r;
q = n0 / b0;
r = n0 - q * b0;
}
if (b0 != 1) return 0;
else return t % n;
}
ll Weierstrass(ll a, ll b, ll x, ll p)
{
return ((((x * x) % p) * x) % p + (a * x) % p + b) % p;
}
ll EPoints(
bool print,
ll a, ll b, ll p,
vector<ECPOINT>& e)
/* returns the number of points on the elliptic
curve y ^ 2 = x ^ 3 + ax + b mod p */
{
ll count = 0, m = (p + 1) / 4, x, y;
ECPOINT pt{};
if (p % 4 == 3) {
for (x = 0; x < p; x++) {
y = Weierstrass(a, b, x, p);
if (JACOBI(y, p) != -1) {
y = ExpMod(y, m, p);
if (print)
{
cout << "(" << setw(2) << x << ", ";
cout << y << ") " << endl;
}
pt.x = x;
pt.y = y;
e.push_back(pt);
count++;
y = -y % p;
if (y < 0) y += p;
if (y != 0)
{
if (print)
{
cout << "(" << setw(2) << x << ", ";
cout << y << ") " << endl;
}
pt.x = x;
pt.y = y;
e.push_back(pt);
count++;
}
if (print && count % 5 == 0)
cout << endl;
}
}
if (print && count % 5 != 0)
cout << endl;
}
return count;
}
void Add(ll a, ll p, ECPOINT P,
ECPOINT Q, ECPOINT& R)
/* elliptic curve point partial addition */
{
ll i, lambda;
if (P.x == Q.x && P.y == 0 && Q.y == 0) {
R.x = 0;
R.y = 1;
return;
}
if (P.x == Q.x && P.y == p - Q.y) {
R.x = 0;
R.y = 1;
return;
}
if (P.x == 0 && P.y == 1) {
R = Q;
return;
}
if (Q.x == 0 && Q.y == 1) {
R = P;
return;
}
if (P.x != Q.x) {
i = Q.x - P.x;
if (i < 0) i += p;
i = ExtendedEuclidean(i, p);
lambda = ((Q.y - P.y) * i) % p;
}
else {
i = ExtendedEuclidean((2 * P.y) % p, p);
lambda = ((3 * P.x * P.x + a) * i) % p;
}
if (lambda < 0) lambda += p;
R.x = (lambda * lambda - P.x - Q.x) % p;
R.y = (lambda * (P.x - R.x) - P.y) % p;
if (R.x < 0) R.x += p;
if (R.y < 0) R.y += p;
}
void Multiply(
ll a, ll k, ll p,
ECPOINT P,
ECPOINT& R)
{
ECPOINT S;
R.x = 0;
R.y = 1;
S = P;
while (k != 0) {
if (k & 1) Add(a, p, R, S, R);
k >>= 1;
if (k != 0) Add(a, p, S, S, S);
}
}
ll Order(ll a, ll p, ECPOINT P)
{
ll order = 1;
ECPOINT Q = P, R{};
do {
order++;
Add(a, p, P, Q, R);
Q = R;
} while (R.x != 0 && R.y != 1);
return order;
}
const int PrimeSize = 10000000;
bool sieve[PrimeSize];
void PopulateSieve() {
// sieve of Eratosthenes
int c, inc, i, n = PrimeSize - 1;
for (i = 0; i < n; i++)
sieve[i] = false;
sieve[1] = false;
sieve[2] = true;
for (i = 3; i <= n; i++)
sieve[i] = (i & 1) == 1 ? true : false;
c = 3;
do {
i = c * c;
inc = c + c;
while (i <= n) {
sieve[i] = false;
i += inc;
}
c += 2;
while (!sieve[c])
c++;
} while (c * c <= n);
}
ll Partition(
vector<ECPOINTORDER>& a, ll n, ll lo, ll hi)
{
ll pivotIndex = lo + (hi - lo) / 2;
ECPOINTORDER po = a[(unsigned int)pivotIndex];
ECPOINTORDER x = po;
ECPOINTORDER t = x;
a[(unsigned int)pivotIndex] = a[(unsigned int)hi];
a[(unsigned int)hi] = t;
ll storeIndex = lo;
for (unsigned int i = (unsigned int)lo; i < (unsigned int)hi; i++)
{
if (a[i].order < x.order)
{
t = a[i];
a[i] = a[(unsigned int)storeIndex];
a[(unsigned int)(storeIndex++)] = t;
}
}
t = a[(unsigned int)storeIndex];
a[(unsigned int)storeIndex] = a[(unsigned int)hi];
a[(unsigned int)hi] = t;
return storeIndex;
}
static void DoQuickSort(
vector<ECPOINTORDER>& a, ll n, ll p, ll r)
{
if (p < r)
{
ll q = Partition(a, n, p, r);
DoQuickSort(a, n, p, q - 1);
DoQuickSort(a, n, q + 1, r);
}
}
void QuickSort(vector<ECPOINTORDER>& a, ll n)
{
DoQuickSort(a, n, 0, n - 1);
}
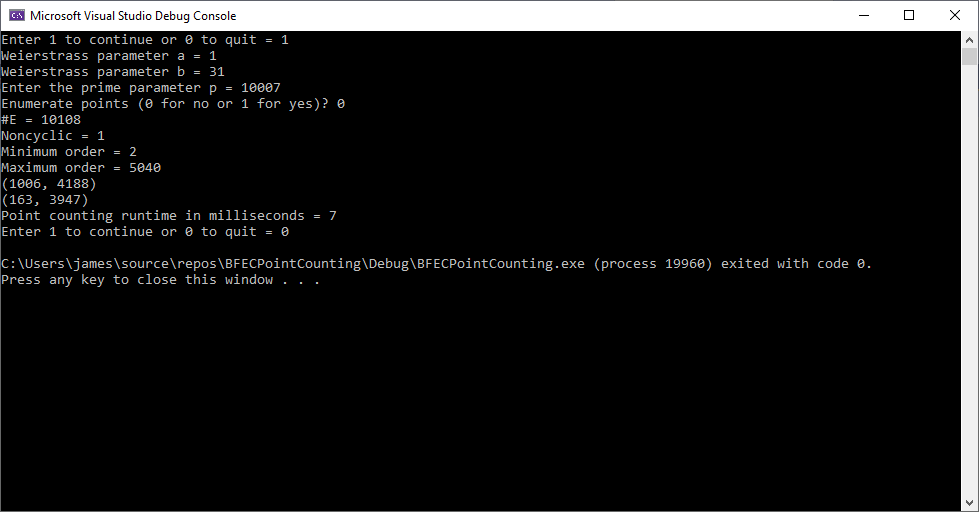
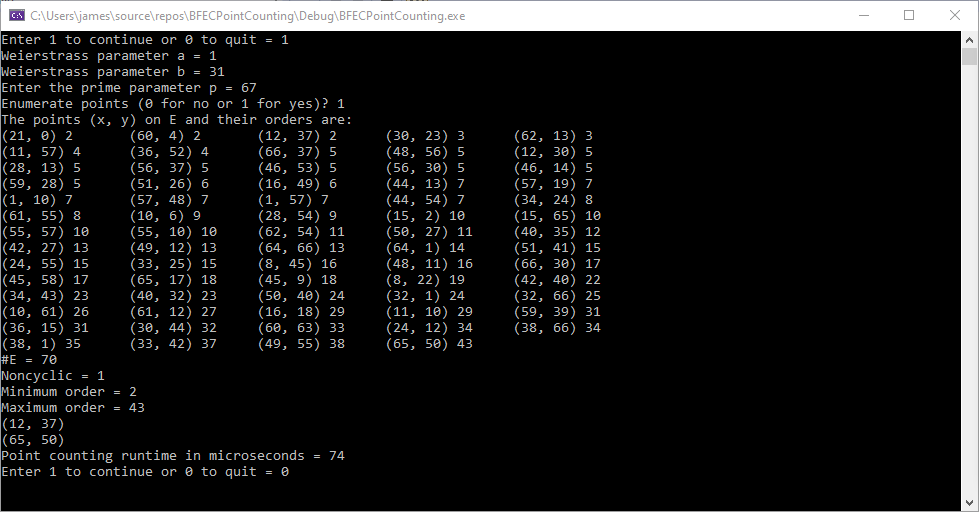
int main()
{
PopulateSieve();
while (true)
{
bool noncyclic = false;
int option;
ll a, b, p;
cout << "Enter 1 to continue or 0 to quit = ";
cin >> option;
if (option == 0)
break;
cout << "Weierstrass parameter a = ";
cin >> a;
cout << "Weierstrass parameter b = ";
cin >> b;
cout << "Enter the prime parameter p = ";
cin >> p;
if (!sieve[p])
{
cout << "p is not a prime number. " << endl;
continue;
}
if (p % 4 != 3)
{
cout << "p mod 4 must be 3 for this algorithm." << endl;
continue;
}
bool print = false, enumerate = false;
vector<ECPOINT> e;
vector<ECPOINTORDER> eOrder;
cout << "Enumerate points (0 for no or 1 for yes)? ";
cin >> option;
enumerate = option == 1;
auto time0 = chrono::high_resolution_clock::now();
ll count = EPoints(print, a, b, p, e);
auto time1 = chrono::high_resolution_clock::now();
auto elapsed = time1 - time0;
ll h = count + 1;
ll maxOrder = 0;
ll minOrder = h;
ll order = -1;
ECPOINT P{}, Q{};
if (enumerate)
cout << "The points (x, y) on E and their orders are:" << endl;
for (unsigned int i = 0; i < count; i++)
{
ECPOINTORDER ptOrder{};
order = Order(a, p, e[i]);
ptOrder.order = order;
ptOrder.pt = e[i];
eOrder.push_back(ptOrder);
if (order < h)
noncyclic = true;
if (order < minOrder) {
P = e[i];
minOrder = order;
}
if (order > maxOrder) {
Q = e[i];
maxOrder = order;
}
}
if (enumerate)
{
QuickSort(eOrder, count);
for (unsigned int i = 0; i < eOrder.size(); i++)
{
cout << "(" << eOrder[i].pt.x << ", ";
cout << eOrder[i].pt.y << ") ";
cout << eOrder[i].order << "\t";
if ((i + 1) % 5 == 0)
cout << endl;
}
if (count % 5 != 0)
cout << endl;
}
cout << "#E = " << h << endl;
cout << "Noncyclic = " << noncyclic << endl;
cout << "Minimum order = " << minOrder << endl;
cout << "Maximum order = " << maxOrder << endl;
cout << "(" << P.x << ", " << P.y << ")" << endl;
cout << "(" << Q.x << ", " << Q.y << ")" << endl;
long long runtime = chrono::duration_cast<chrono::milliseconds>(elapsed).count();
if (runtime != 0)
cout << "Point counting runtime in milliseconds = " << runtime << endl;
else
{
runtime = chrono::duration_cast<chrono::microseconds>(elapsed).count();
cout << "Point counting runtime in microseconds = " << runtime << endl;
}
}
return 0;
}
