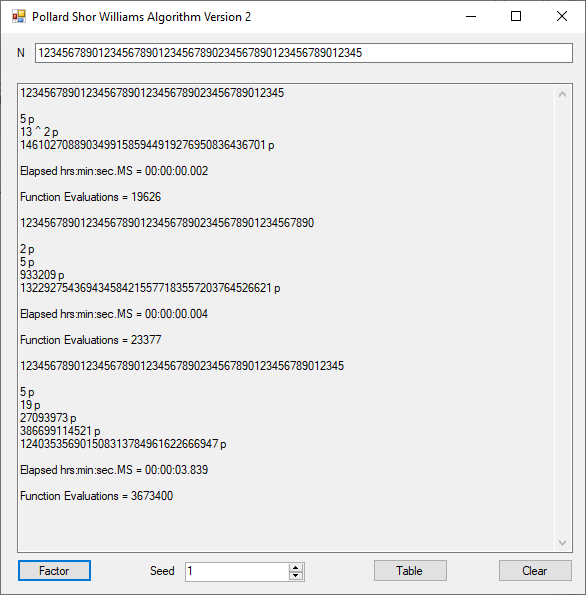
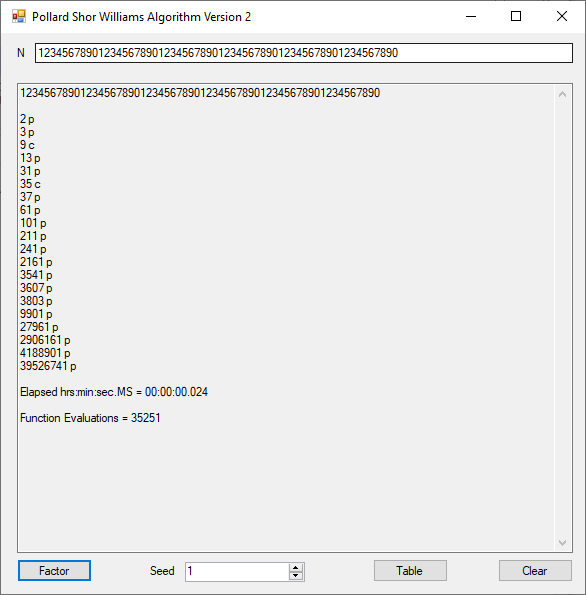
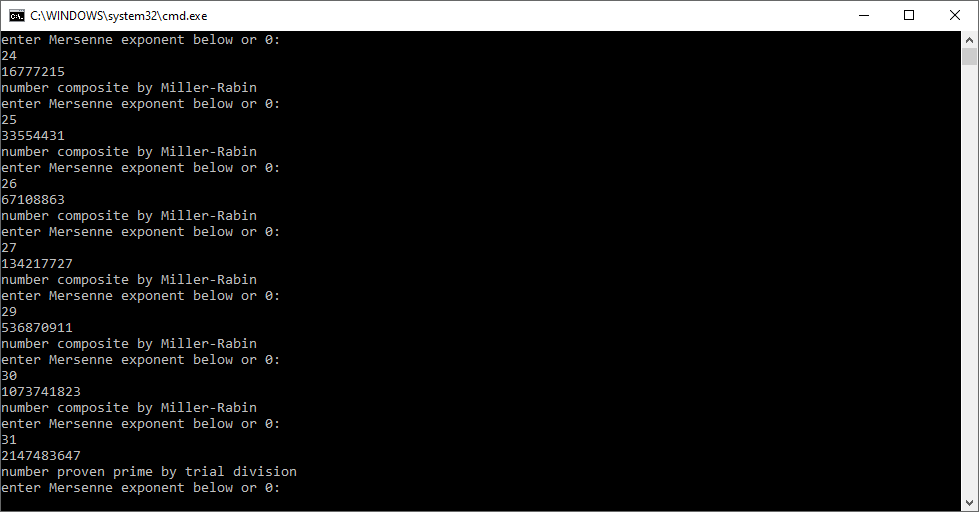
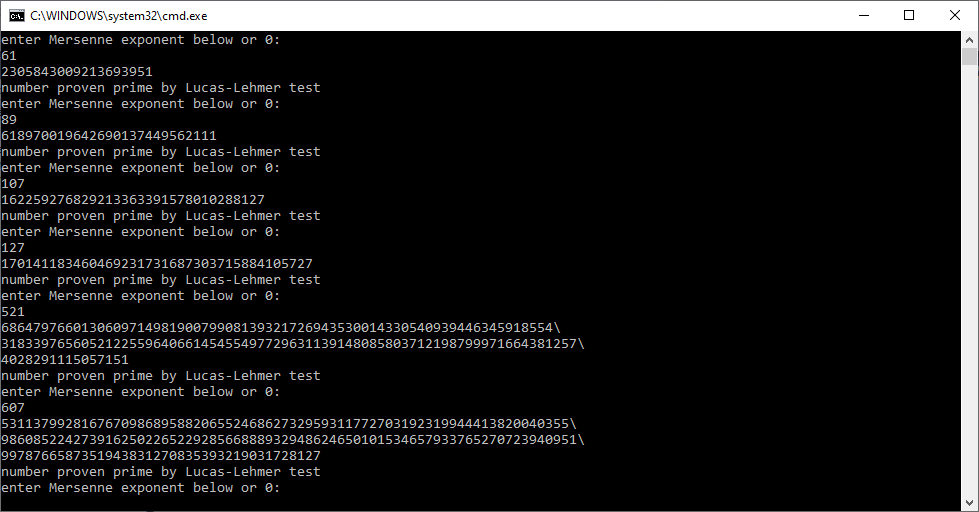
This factoring algorithm is based on Pollard’s rho, Shor’s classical, and my modification of the two preceding methods.
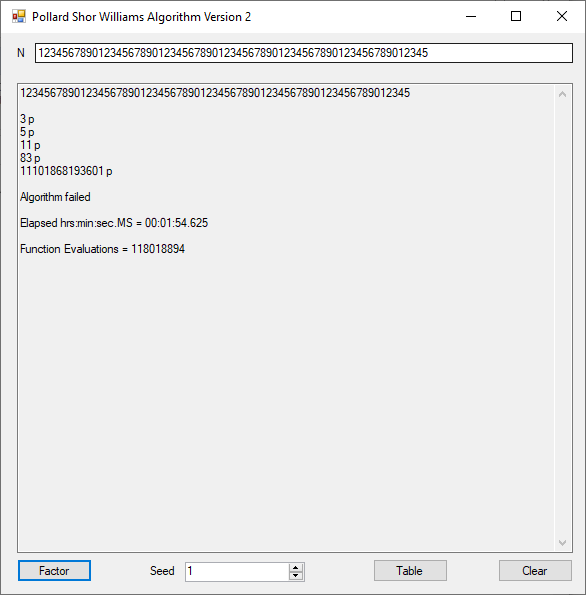
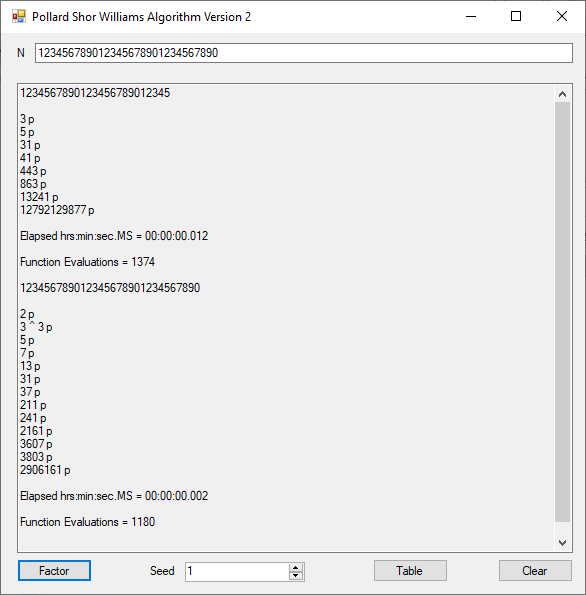

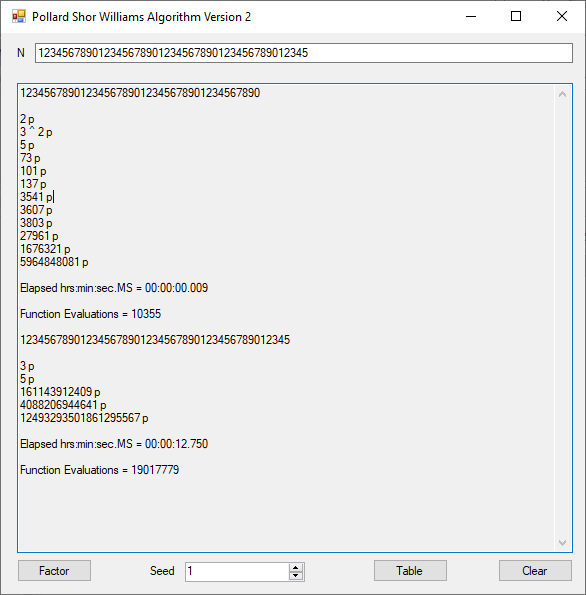
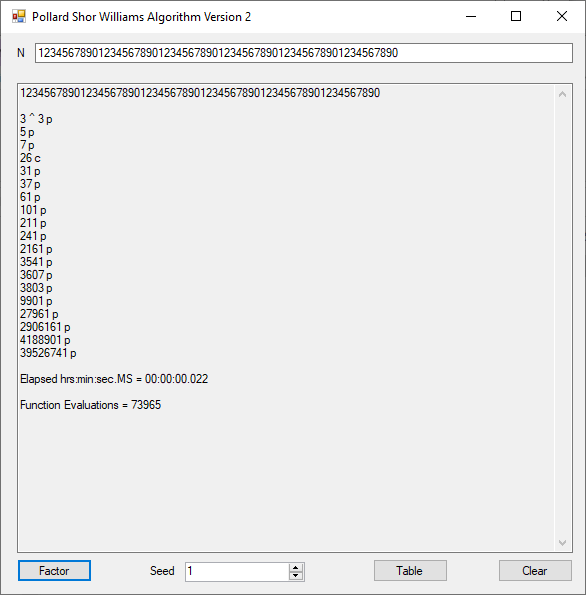
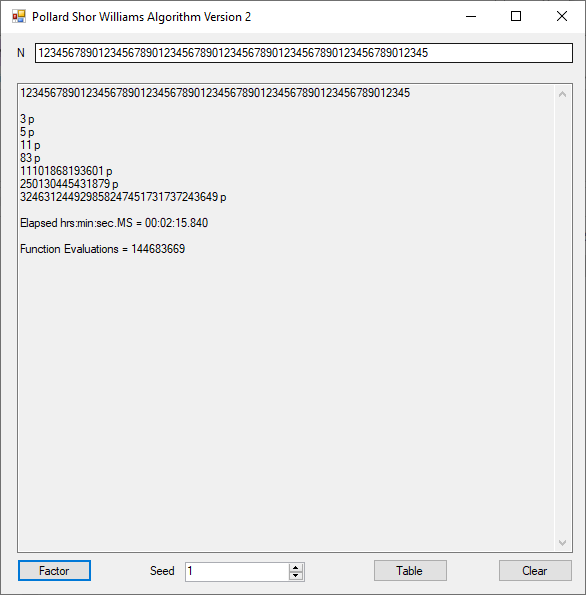
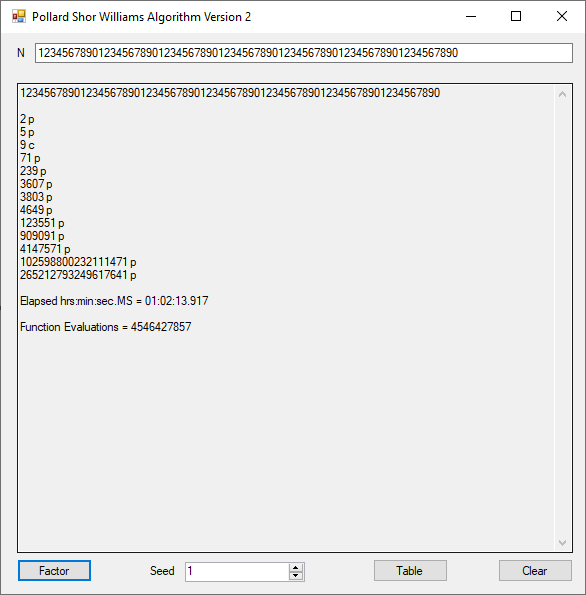
This factoring algorithm is based on Pollard’s rho, Shor’s classical, and my modification of the two preceding methods.

I wrote and debugged this C# code after I found out that my 1989 vector calculator in Modula-2 for the Commadore Amiga 2000 was not working correctly.
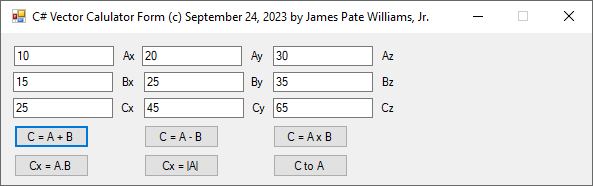
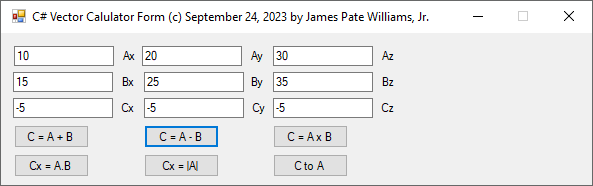
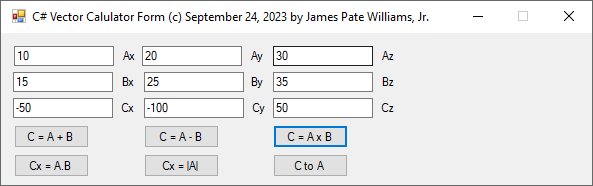
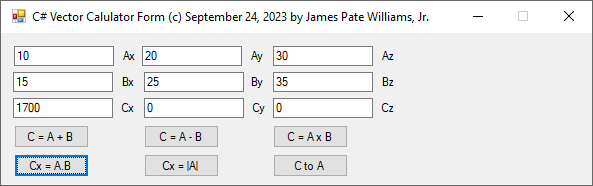
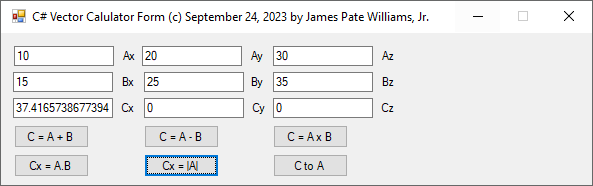
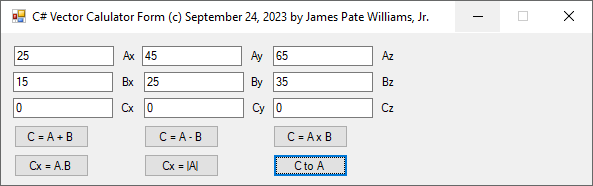
// C# Three-Dimensional Cartesian Vector Calculator
// (c) September 24, 2023 by James Pate Williams, Jr.
// All Applicable Rights Reserved
using System;
using System.Windows.Forms;
namespace CSVectorCalculator
{
public partial class MainForm : Form
{
public MainForm()
{
InitializeComponent();
}
private static double[] A = new double[3];
private static double[] B = new double[3];
private static double[] C = new double[3];
private void ValidateAB(
ref bool valid)
{
try
{
A[0] = double.Parse(textBox1.Text);
A[1] = double.Parse(textBox2.Text);
A[2] = double.Parse(textBox3.Text);
B[0] = double.Parse(textBox4.Text);
B[1] = double.Parse(textBox5.Text);
B[2] = double.Parse(textBox6.Text);
valid = true;
}
catch (Exception ex)
{
MessageBox.Show(ex.Message, "Warning",
MessageBoxButtons.OK, MessageBoxIcon.Warning);
valid = false;
}
}
private void FillC(double[] C)
{
textBox7.Text = C[0].ToString();
textBox8.Text = C[1].ToString();
textBox9.Text = C[2].ToString();
}
private void button1_Click(object sender, EventArgs e)
{
bool valid = true;
ValidateAB(ref valid);
if (valid)
{
C[0] = A[0] + B[0];
C[1] = A[1] + B[1];
C[2] = A[2] + B[2];
FillC(C);
}
}
private void button2_Click(object sender, EventArgs e)
{
bool valid = true;
ValidateAB(ref valid);
if (valid)
{
C[0] = A[0] - B[0];
C[1] = A[1] - B[1];
C[2] = A[2] - B[2];
FillC(C);
}
}
private void button3_Click(object sender, EventArgs e)
{
bool valid = true;
ValidateAB(ref valid);
if (valid)
{
C[0] = A[1] * B[2] - A[2] * B[1];
C[1] = A[0] * B[2] - A[2] * B[0];
C[2] = A[1] * B[0] - A[0] * B[1];
FillC(C);
}
}
private void button4_Click(object sender, EventArgs e)
{
bool valid = true;
ValidateAB(ref valid);
if (valid)
{
C[0] = A[0] * B[0] + A[1] * B[1] + A[2] * B[2];
C[1] = C[2] = 0.0;
FillC(C);
}
}
private void button5_Click(object sender, EventArgs e)
{
bool valid = true;
ValidateAB(ref valid);
if (valid)
{
C[0] = Math.Sqrt(A[0] * A[0] + A[1] * A[1] + A[2] * A[2]);
C[1] = C[2] = 0.0;
FillC(C);
}
}
private void button6_Click(object sender, EventArgs e)
{
bool valid = true;
ValidateAB(ref valid);
if (valid)
{
textBox1.Text = C[0].ToString();
textBox2.Text = C[1].ToString();
textBox3.Text = C[2].ToString();
C[0] = C[1] = C[2] = 0.0;
FillC(C);
}
}
}
}


Back in 2017 I created a C# application that implemented the direct methods: Cholesky decomposition, Gaussian elimination with partial pivoting, LU decomposition, and simple Gaussian elimination. The classical iterative methods Gauss-Seidel, Jacobi, Successive Overrelaxation, and gradient descent were also implemented along with the modern iterative methods: conjugate gradient descent and Modified Richardson’s method. Recently I translated the C# code to C++. I used the following test matrices: Cauchy, Lehmer, Pascal, and other. Below are some results. As is apparent the C++ runtimes are faster than the C# execution times.


The Richardson Method is called before eliminating the system of linear equations.
Added elimination results from a vanilla C program and a C# application.


These results are not in total agreement with H. T. Lau’s results.
My reference is Numerical Analysis: An Algorithmic Approach 3rd Edition by S. D. Conte and Carl de Boor Chapter 9.1.