My whole legal name is James Pate Williams, Jr. I was born in LaGrange, Georgia approximately 70 years ago. I barely graduated from LaGrange High School with low marks in June 1971. Later in June 1979, I graduated from LaGrange College with a Bachelor of Arts in Chemistry with a little over a 3 out 4 Grade Point Average (GPA). In the Spring Quarter of 1978, I taught myself how to program a Texas Instruments desktop programmable calculator and in the Summer Quarter of 1978 I taught myself Dayton BASIC (Beginner's All-purpose Symbolic Instruction Code) on LaGrange College's Data General Eclipse minicomputer. I took courses in BASIC in the Fall Quarter of 1978 and FORTRAN IV (Formula Translator IV) in the Winter Quarter of 1979. Professor Kenneth Cooper, a genius poly-scientist taught me a course in the Intel 8085 microprocessor architecture and assembly and machine language. We would hand assemble our programs and insert the resulting machine code into our crude wooden box computer which was designed and built by Professor Cooper. From 1990 to 1994 I earned a Bachelor of Science in Computer Science from LaGrange College. I had a 4 out of 4 GPA in the period 1990 to 1994. I took courses in C, COBOL, and Pascal during my BS work. After graduating from LaGrange College a second time in May 1994, I taught myself C++. In December 1995, I started using the Internet and taught myself client-server programming. I created a website in 1997 which had C and C# implementations of algorithms from the "Handbook of Applied Cryptography" by Alfred J. Menezes, et. al., and some other cryptography and number theory textbooks and treatises.
#pragma once
#include <vector>
using namespace std;
typedef struct Point
{
int n;
long double derivative, x, y;
} POINT, *PPOINT;
class RungeKutta4
{
private:
static long double FX(
long double x,
long double y);
static long double DFDX(
long double x,
long double y,
long double yp);
public:
static void ComputeEuler(
int nSteps,
long double x0,
long double x1,
long double y0,
vector<Point>& pts);
static void ComputeRK2(
int nSteps,
long double x0,
long double x1,
long double y0,
vector<Point>& pts);
static void ComputeRK4(
int nSteps,
long double x0,
long double x1,
long double y0,
vector<Point>& pts);
static void ComputeTaylor(
int nSteps,
long double x0,
long double x1,
long double y0,
vector<Point>& pts);
};
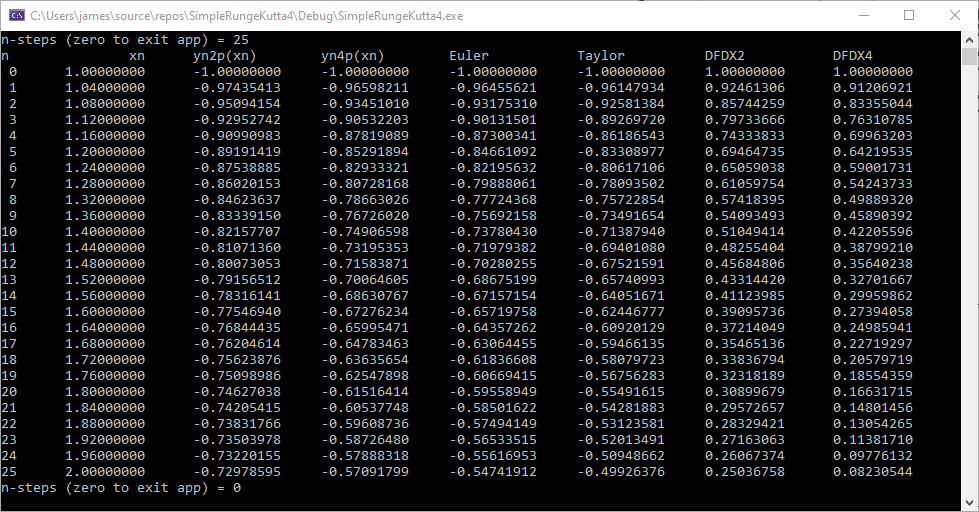
// Translated from FORTRAN 77 source code found
// in "Elementary Numerical Analysis:
// An Algorithmic Approach" by S. D. Conte and Carl de
// Boor. Translator: James Pate Williams, Jr. (c)
// August 20, 2023
#include "RungeKutta4.h"
long double RungeKutta4::FX(
long double x, long double y)
{
long double x2 = x * x;
long double term1 = 1.0 / x2;
long double term2 = -y / x;
long double term3 = -y * y;
return term1 + term2 + term3;
}
long double RungeKutta4::DFDX(
long double x,
long double y,
long double yp)
{
long double x3 = x * x * x;
long double term1 = -2.0 / x3;
long double term2 = -yp / x;
long double term3 = y / x / x;
long double term4 = -2.0 * y * yp;
return term1 + term2 + term3 + term4;
}
void RungeKutta4::ComputeEuler(
int nSteps,
long double x0,
long double x1,
long double y0,
vector<Point>& pts)
{
Point pt0 = {};
pt0.n = 0;
pt0.x = x0;
pt0.y = y0;
double derivative = FX(x0, y0);
pt0.derivative = derivative;
pts.push_back(pt0);
if (nSteps == 1)
return;
long double h = (x1 - x0) / nSteps;
long double xn = x0;
long double yn = y0;
for (int n = 1; n <= nSteps; n++)
{
xn = x0 + n * h;
long double yn = y0 + h * FX(xn, y0);
derivative = FX(xn, y0);
pt0.n = n;
pt0.derivative = derivative;
pt0.x = xn;
pt0.y = yn;
pts.push_back(pt0);
y0 = yn;
}
}
void RungeKutta4::ComputeRK2(
int nSteps,
long double x0,
long double x1,
long double y0,
vector<Point>& pts)
{
Point pt0 = {};
pt0.n = 0;
pt0.x = x0;
pt0.y = y0;
double derivative = FX(x0, y0);
pt0.derivative = derivative;
pts.push_back(pt0);
if (nSteps == 1)
return;
long double h = (x1 - x0) / nSteps;
long double xn = x0;
long double yn = y0;
for (int n = 1; n <= nSteps; n++)
{
long double k1 = h * FX(xn, yn);
long double k2 = h * FX(xn + h, yn + k1);
yn += 0.5 * (k1 + k2);
xn = x0 + n * h;
derivative = FX(xn, yn);
pt0.n = n;
pt0.derivative = derivative;
pt0.x = xn;
pt0.y = yn;
pts.push_back(pt0);
}
}
void RungeKutta4::ComputeRK4(
int nSteps,
long double x0,
long double x1,
long double y0,
vector<Point>& pts)
{
Point pt0 = {};
pt0.n = 0;
pt0.x = x0;
pt0.y = y0;
double derivative = FX(x0, y0);
pt0.derivative = derivative;
pts.push_back(pt0);
if (nSteps == 1)
return;
long double h = (x1 - x0) / nSteps;
long double xn = x0;
long double yn = y0;
for (int n = 1; n <= nSteps; n++)
{
long double k1 = h * FX(xn, yn);
long double k2 = h * FX(xn + h / 2, yn + k1 / 2);
long double k3 = h * FX(xn + h / 2, yn + k2 / 2);
long double k4 = h * FX(xn + h, yn + k3);
xn = x0 + n * h;
yn = yn + (k1 + k2 + k3 + k4) / 6.0;
derivative = FX(xn, yn);
pt0.n = n;
pt0.derivative = derivative;
pt0.x = xn;
pt0.y = yn;
pts.push_back(pt0);
}
}
void RungeKutta4::ComputeTaylor(
int nSteps,
long double x0,
long double x1,
long double y0,
vector<Point>& pts)
{
Point pt0 = {};
pt0.n = 0;
pt0.x = x0;
pt0.y = y0;
double derivative = FX(x0, y0);
pt0.derivative = derivative;
pts.push_back(pt0);
if (nSteps == 1)
return;
long double h = (x1 - x0) / nSteps;
long double xn = x0;
long double yn = y0;
long double yp = FX(x0, y0);
for (int n = 1; n <= nSteps; n++)
{
xn = x0 + n * h;
yp = FX(xn, y0);
long double yn = y0 + h * (FX(xn, y0) + h * DFDX(xn, y0, yp) / 2);
derivative = FX(xn, y0);
pt0.n = n;
pt0.derivative = derivative;
pt0.x = xn;
pt0.y = yn;
pts.push_back(pt0);
y0 = yn;
}
}
Below are three screenshots of two methods of calculating the determinant of a matrix, namely the Bareiss Algorithm and Gaussian Elimination:
using System;
using System.Diagnostics;
using System.Windows.Forms;
namespace MatrixInverseComparison
{
public partial class MainForm : Form
{
public MainForm()
{
InitializeComponent();
}
static private string FormatNumber(double x)
{
string result = string.Empty;
if (x > 0)
result += x.ToString("F5").PadLeft(10);
else
result += x.ToString("F5").PadLeft(10);
return result;
}
private void MultiplyPrintMatricies(
double[,] A, double[,] B, int n)
{
double[,] I = new double[n, n];
textBox1.Text += "Matrix Product:\r\n";
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
double sum = 0.0;
for (int k = 0; k < n; k++)
sum += A[i, k] * B[k, j];
I[i, j] = sum;
}
}
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
textBox1.Text += FormatNumber(I[i, j]) + " ";
}
textBox1.Text += "\r\n";
}
}
private void PrintMatrix(string title, double[,] A, int n)
{
textBox1.Text += title + "\r\n";
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
textBox1.Text += FormatNumber(A[i, j]) + " ";
}
textBox1.Text += "\r\n";
}
}
private void Compute(double[,] MI, int n)
{
double determinantGE = 1;
double[] b = new double[n];
double[] x = new double[n];
double[,] MB1 = new double[n, n];
double[,] MB2 = new double[n, n];
double[,] MG = new double[n, n];
double[,] MS = new double[n, n];
double[,] IG = new double[n, n];
double[,] IS = new double[n, n];
int[] pivot = new int[n];
Stopwatch sw = new();
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
MB1[i, j] = MB2[i, j] = MG[i, j] = MS[i, j] = MI[i, j];
}
PrintMatrix("Initial Matrix: ", MI, n);
sw.Start();
int flag = DirectMethods.Factor(MG, n, pivot);
if (flag != 0)
{
for (int i = 0; i < n; i++)
determinantGE *= MG[i, i];
determinantGE *= flag;
}
sw.Stop();
PrintMatrix("Gaussian Elimination Final:", MG, n);
for (int i = 0; i < n; i++)
b[i] = 0;
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
b[j] = 1.0;
DirectMethods.Substitute(MG, b, x, n, pivot);
for (int k = 0; k < n; k++)
IG[k, j] = x[k];
b[j] = 0.0;
}
}
PrintMatrix("Gaussian Elimination Inverse:", IG, n);
textBox1.Text += "Determinant: " +
FormatNumber(determinantGE) + "\r\n";
MultiplyPrintMatricies(IG, MI, n);
textBox1.Text += "Runtime (MS) = " +
sw.ElapsedMilliseconds + "\r\n";
sw.Start();
double determinant1 = BareissAlgorithm.Determinant1(MB1, n);
sw.Stop();
PrintMatrix("Bareiss Algorithm Final 1:", MB1, n);
textBox1.Text += "Determinant: " +
FormatNumber(determinant1) + "\r\n";
textBox1.Text += "Runtime (MS) = " +
sw.ElapsedMilliseconds + "\r\n";
sw.Start();
double determinant2 = BareissAlgorithm.Determinant2(MB2, n);
sw.Stop();
PrintMatrix("Bareiss Algorithm Final 2:", MB2, n);
textBox1.Text += "Determinant: " +
FormatNumber(determinant2) + "\r\n";
textBox1.Text += "Runtime (MS) = " +
sw.ElapsedMilliseconds + "\r\n";
}
private void button1_Click(object sender, EventArgs e)
{
int n = (int)numericUpDown1.Value;
int seed = (int)numericUpDown2.Value;
double[,] A = new double[n, n];
Random random = new Random(seed);
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
double q = n * random.NextDouble();
while (q == 0.0)
q = n * random.NextDouble();
A[i, j] = q;
}
}
Compute(A, n);
}
private void button2_Click(object sender, EventArgs e)
{
textBox1.Text = string.Empty;
}
}
}
using System;
namespace MatrixInverseComparison
{
public class DirectMethods
{
// Substitute and Factor translated from FORTRAN 77
// source code found in "Elementary Numerical Analysis:
// An Algorithmic Approach" by S. D. Conte and Carl de
// Boor. Translator: James Pate Williams, Jr. (c)
// August 14 - 17, 2023
static public void Substitute(
double[,] w,
double[] b,
double[] x,
int n,
int[] pivot)
{
double sum;
int i, j, n1 = n - 1;
if (n == 1)
{
x[0] = b[0] / w[0, 0];
return;
}
// forward substitution
x[0] = b[pivot[0]];
for (i = 0; i < n; i++)
{
for (j = 0, sum = 0.0; j < i; j++)
sum += w[i, j] * x[j];
x[i] = b[pivot[i]] - sum;
}
// backward substitution
x[n1] /= w[n1, n1];
for (i = n - 2; i >= 0; i--)
{
for (j = i + 1, sum = 0.0; j < n; j++)
sum += w[i, j] * x[j];
x[i] = (x[i] - sum) / w[i, i];
}
}
// Factor returns +1 if an even number of exchanges
// Factor returns -1 if an odd number of exchanges
// Factor retrurn 0 if matrix is singular
static public int Factor(
double[,] w, int n, int[] pivot)
// returns 0 if matrix is singular
{
double awikod, col_max, ratio, row_max, temp;
double[] d = new double[n];
int flag = 1, i, i_star, j, k;
for (i = 0; i < n; i++)
{
pivot[i] = i;
row_max = 0;
for (j = 0; j < n; j++)
row_max = Math.Max(row_max, Math.Abs(w[i, j]));
if (row_max == 0)
{
flag = 0;
row_max = 1;
}
d[i] = row_max;
}
if (n <= 1)
return flag;
// factorization
for (k = 0; k < n - 1; k++)
{
// determine pivot row the row i_star
col_max = Math.Abs(w[k, k]) / d[k];
i_star = k;
for (i = k + 1; i < n; i++)
{
awikod = Math.Abs(w[i, k]) / d[i];
if (awikod > col_max)
{
col_max = awikod;
i_star = i;
}
}
if (col_max == 0)
flag = 0;
else
{
if (i_star > k)
{
// make k the pivot row by
// interchanging with i_star
flag *= -1;
i = pivot[i_star];
pivot[i_star] = pivot[k];
pivot[k] = i;
temp = d[i_star];
d[i_star] = d[k];
d[k] = temp;
for (j = 0; j < n; j++)
{
temp = w[i_star, j];
w[i_star, j] = w[k, j];
w[k, j] = temp;
}
}
// eliminate x[k]
for (i = k + 1; i < n; i++)
{
w[i, k] /= w[k, k];
ratio = w[i, k];
for (j = k + 1; j < n; j++)
w[i, j] -= ratio * w[k, j];
}
}
}
if (w[n - 1, n - 1] == 0)
flag = 0;
return flag;
}
}
}
namespace MatrixInverseComparison
{
// One implementation is based on https://en.wikipedia.org/wiki/Bareiss_algorithm
// Another perhaps better implementation is found on the following webpage
// https://cs.stackexchange.com/questions/124759/determinant-calculation-bareiss-vs-gauss-algorithm
class BareissAlgorithm
{
static public double Determinant1(double[,] M, int n)
{
double M00;
for (int k = 0; k < n; k++)
{
if (k - 1 == -1)
M00 = 1;
else
M00 = M[k - 1, k - 1];
for (int i = k + 1; i < n; i++)
{
for (int j = k + 1; j < n; j++)
{
M[i, j] = (
M[i, j] * M[k, k] -
M[i, k] * M[k, j]) / M00;
}
}
}
return M[n - 1, n - 1];
}
static public double Determinant2(double[,] A, int dim)
{
if (dim <= 0)
{
return 0;
}
double sign = 1;
for (int k = 0; k < dim - 1; k++)
{
//Pivot - row swap needed
if (A[k, k] == 0)
{
int m;
for (m = k + 1; m < dim; m++)
{
if (A[m, k] != 0)
{
double[] tempRow = new double[dim];
for (int i = 0; i < dim; i++)
tempRow[i] = A[m, i];
for (int i = 0; i < dim; i++)
A[m, i] = A[k, i];
for (int i = 0; i < dim; i++)
A[k, i] = tempRow[i];
sign = -sign;
break;
}
}
//No entries != 0 found in column k -> det = 0
if (m == dim)
{
return 0;
}
}
//Apply formula
for (int i = k + 1; i < dim; i++)
{
for (int j = k + 1; j < dim; j++)
{
A[i, j] = A[k, k] * A[i, j] - A[i, k] * A[k, j];
if (k >= 1)
{
A[i, j] /= A[k - 1, k - 1];
}
}
}
}
return sign * A[dim - 1, dim - 1];
}
}
}
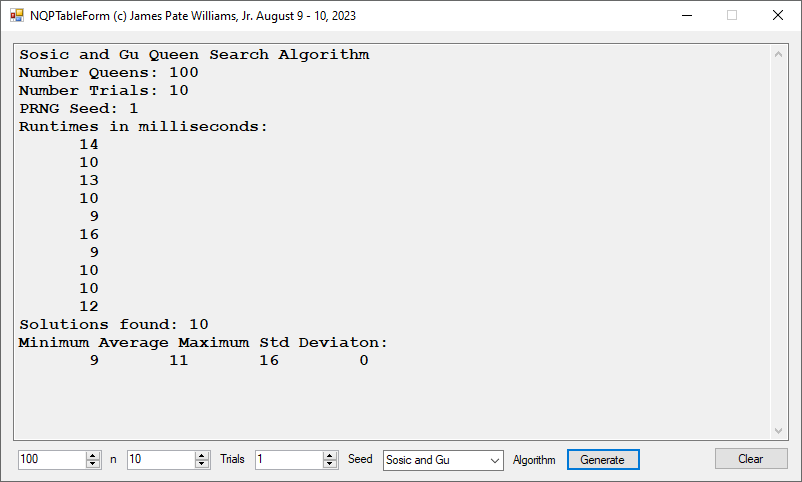
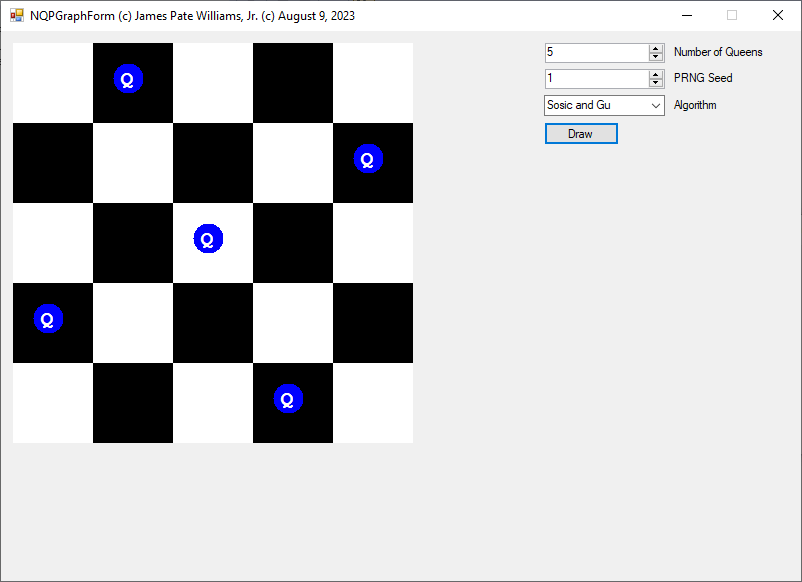
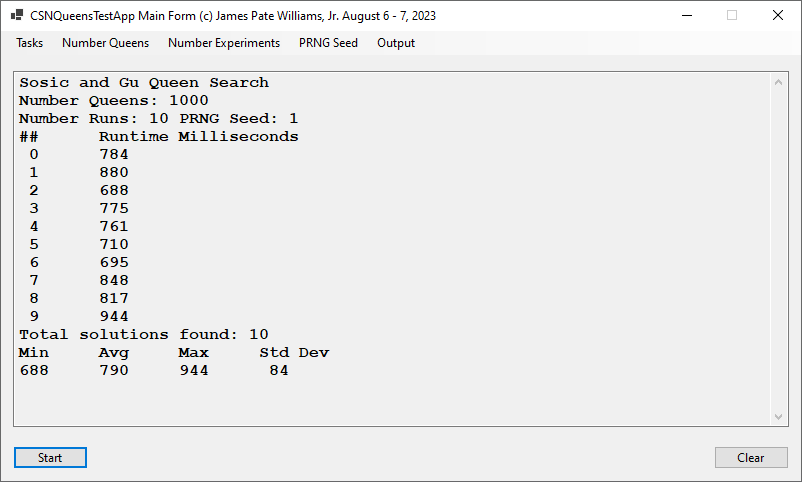
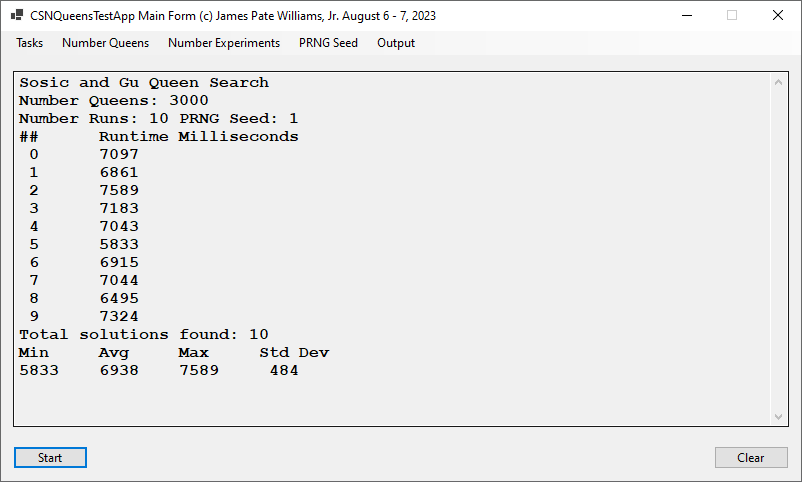
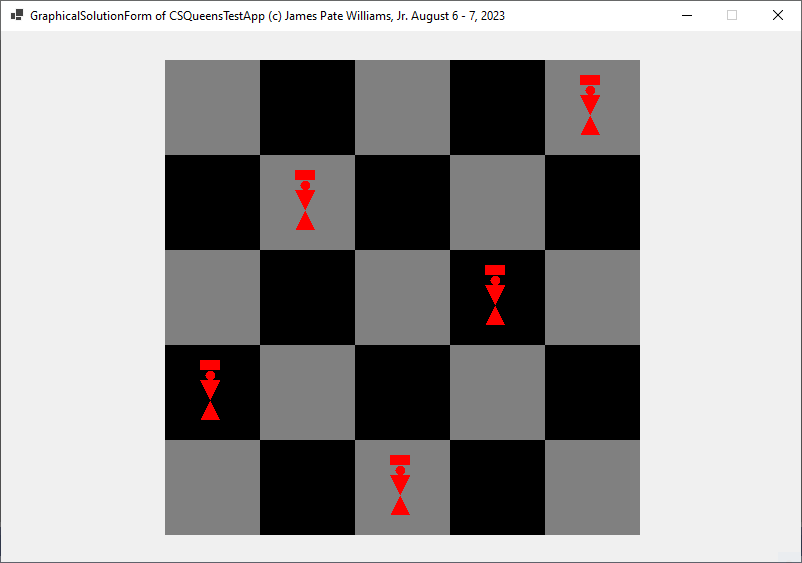
I implemented the Sosic and Gu fast N-Queens solver first in C++ and later in C#. The five screen shots below were created by latest C# application. None of my other algorithms can compete with this method.
My hill-climber results are pretty disappointing. I have gotten some decent runs of back-marking for n = 50 and n = 60 queens. I show the n = 60 queens experiment below.
==Menu==
**Instance Submenu**
1 Single Instance Test
2 Multiple Instances Test
3 Exit
Enter an option '1' to '3': 2
**Algorithm Submenu**
1 Arc-Consistency 3
2 Arc-Consistency 4
3 Backjump
4 Backmark
5 Chronological Bactracking
6 Evolutionary Hill-Climber
7 Exit
Enter an algorithm ('1' to '7'): 4
Enter the number of queens for option '2': 60
Enter the number of samples to be analyzed: 10
Minimum Runtime in Microseconds: 4819
Average Runtime in Microseconds: 10419330
Maximum Runtime in Micorseconds: 45439444
Standard Sample Deviation: 16665688
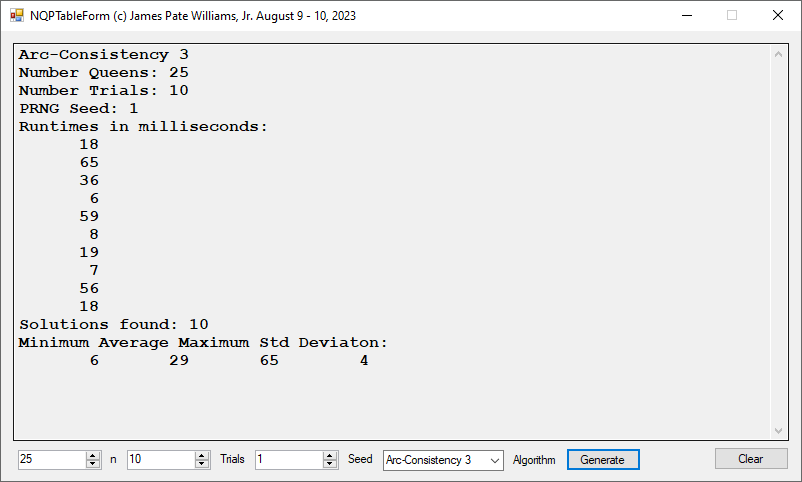
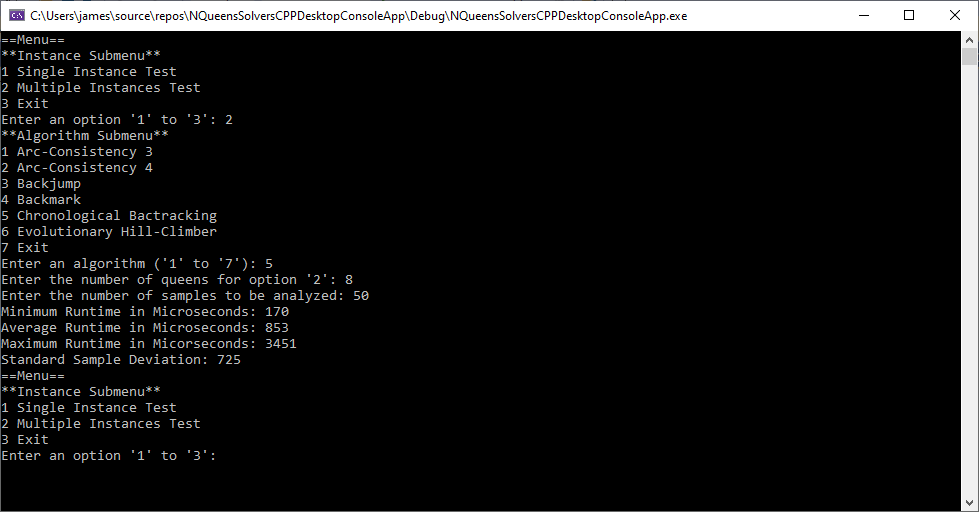
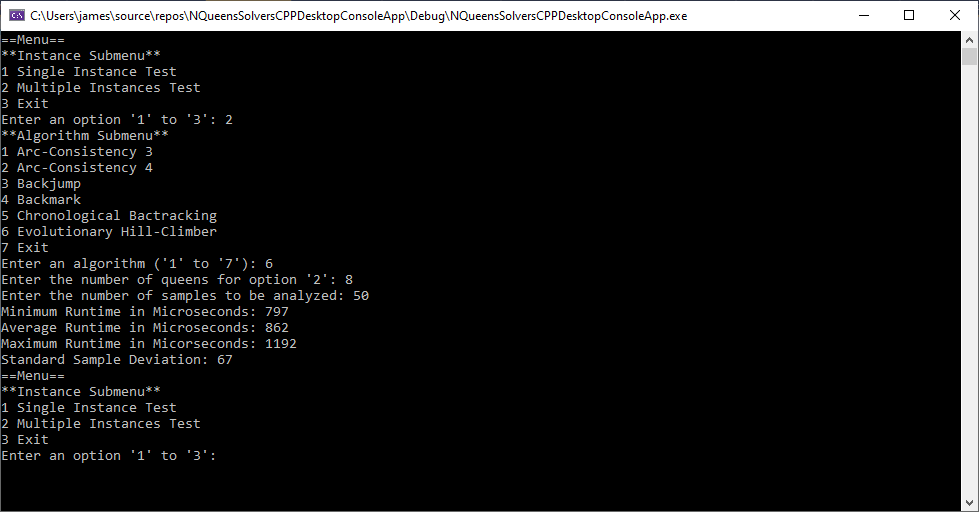
Most of the six algorithms were developed back in the years 1999 to 2001 when I was a Master of Software Engineering and Doctoral candidate at Auburn University. Professor Gerry V. Dozier was my Master research advisor. The algorithms developed were in alphabetical order:
Arc-Consistency 3
Arc-Consistency 4
Backjump
Backmark
Chronological Backtracking
Evolutionary Hill-Climber (My algorithm)
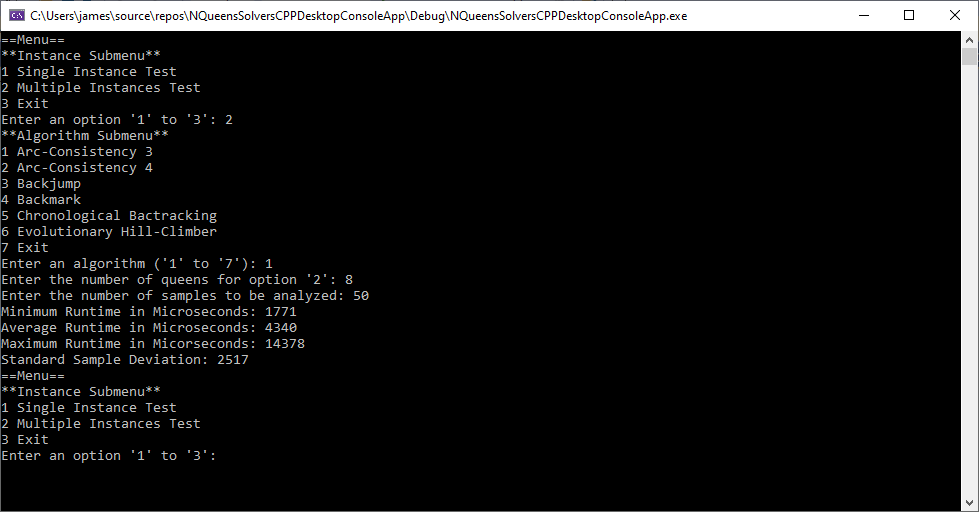
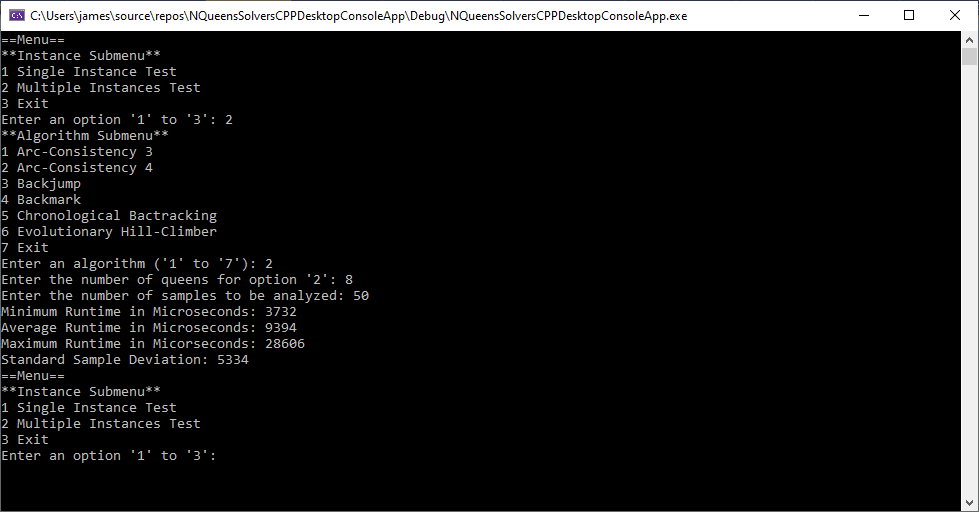
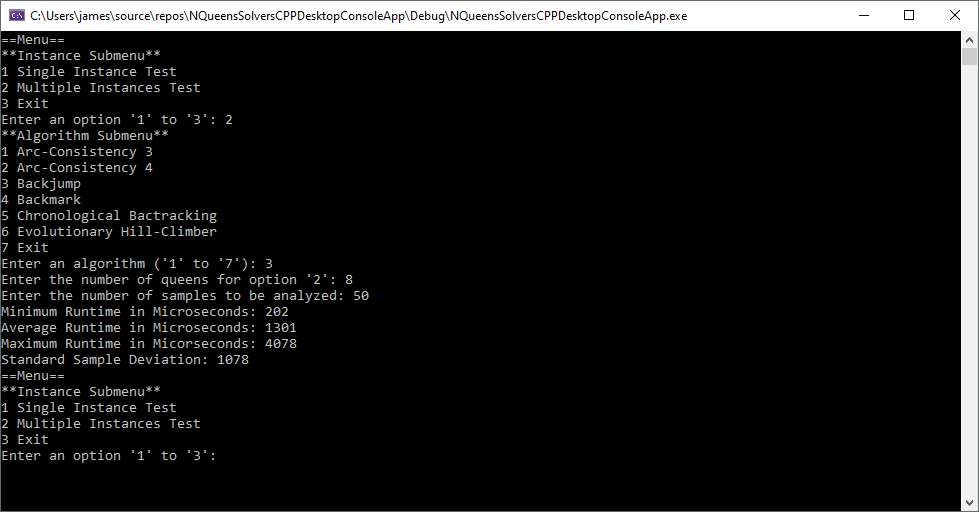
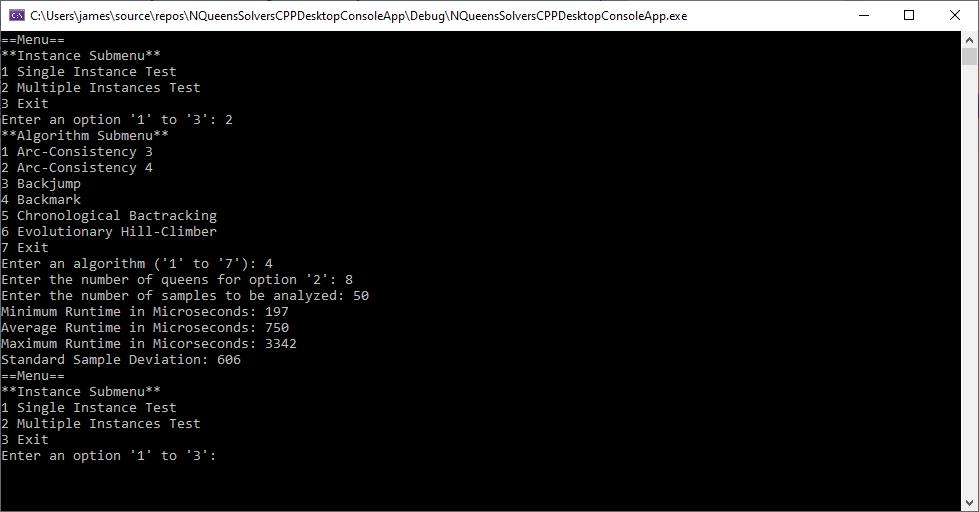
The first five algorithms were stated in pseudocode in the excellent treatise Foundations of Constraint Satisfaction by Edward Tsang. Below are six runs of my test C++ application (Win32 Console App) using 8 queens and 50 samples.